
Kurs:Lineare Algebra (Osnabrück 2015-2016)/Teil II/Vorlesung 50/latex
\setcounter{section}{50}
\bild{ \begin{center}
\includegraphics[width=5.5cm]{\bildeinlesung {Hexahedron.svg} }
\end{center}
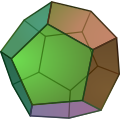
\bildtext {... und ein Würfel. Das sind die platonischen Körper.} }
\bildlizenz { Hexahedron.svg } {} {} {Commons} {} {}
-
 Ein Tetraeder (eine Pyramide mit gleichseitigen Dreiecken als Seiten).
Ein Tetraeder (eine Pyramide mit gleichseitigen Dreiecken als Seiten). -
 Ein Oktaeder (ein Achtflächner).
Ein Oktaeder (ein Achtflächner). -
 Ein Dodekaeder, der hat zwölf Seiten.
Ein Dodekaeder, der hat zwölf Seiten. -
 Ein Ikosaeder, mit 20 Seiten ...
Ein Ikosaeder, mit 20 Seiten ...




Jede Symmetrie an einen Körper im Raum \zusatzklammer {beispielsweise einem Würfel} {} {} ist insbesondere eine abstandserhaltende, affin-lineare Abbildung des umgebenden Raumes. Die Gesamtmenge der abstandserhaltenden, linearen \zusatzklammer {eigentlichen} {} {} Abbildungen des Raumes bildet die sogenannte \stichwort {orthogonale Gruppe} {} $\operatorname{O}_{ 3 } \!$ \zusatzklammer {bzw. $\operatorname{SO}_{3}$, wenn die Determinante $1$ ist} {} {.} Dies ist natürlich eine sehr große, unendliche Gruppe. Interessant ist aber, dass die endlichen Untergruppen darin übersichtlich beschrieben werden können. Diese endlichen Untergruppen lassen sich stets als Symmetriegruppe zu einem geeigneten geometrischen Objekt auffassen. Dass eine einfache Klassifikation dieser endlichen Bewegungsgruppen möglich ist, beruht auf intrinsischen Struktureigenschaften des Raumes und liefert unter Anderem eine präzise Version dafür, dass es nur fünf reguläre Polyeder \zusatzklammer {die \stichwort {platonischen Körper} {}} {} {} gibt.
\bild{ \begin{center}
\includegraphics[width=5.5cm]{\bildeinlesung {Metano.png} }
\end{center}
\bildtext {Tetraeder treten auch in der Chemie auf, hier ein Methanmolekül.} }
\bildlizenz { Metano.png } {} {Kaprak} {Commons} {PD} {}
\inputbeispiel{}
{
Wir betrachten einen \stichwort { Tetraeder} {,} also eine Pyramide mit vier gleichseitigen Dreiecken als Flächen. Das einfachste Modell dafür ergibt sich, wenn man bei einem Würfel jeden \anfuehrung{zweiten}{} Punkt nimmt, also beispielsweise die Eckpunkte
\mathdisp {(1,1,1),\, (-1,-1,1),\, (1,-1,-1), \, (-1,1,-1)} { . }
Der Abstand der Eckpunkte zum Nullpunkt ist dann $\sqrt{3}$ und die Kantenlängen sind $\sqrt{2}$. Eine eigentliche Bewegung des Tetraeders ist auch eine eigentliche Bewegung des zugehörigen Würfels
\zusatzklammer {in den der Tetraeder eingeschrieben werden kann} {} {}
}
\inputdefinition
{}
{
Zu
\mavergleichskette
{\vergleichskette
{ n
}
{ \in }{ \N
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
heißt die
\definitionsverweis {Untergruppe}{}{}
\mavergleichskettedisp
{\vergleichskette
{A_n
}
{ \defeq} {{ \left\{ \sigma \in S_n \mid \operatorname{sgn}(\sigma) = 1 \right\} }
}
{ } {
}
{ } {
}
{ } {
}
}
{}{}{}
der
\definitionsverweis {geraden Permutationen}{}{}
die \definitionswort {alternierende Gruppe}{.}
}
Die alternierende Gruppe besitzt
\zusatzklammer {bei
\mathl{n \geq 2}{}} {} {}
\mathl{{ \frac{ n! }{ 2 } }}{} Elemente. Nach
Aufgabe 50.12
ist die Tetraedergruppe isomorph zu $A_4$.
Wir wollen im Folgenden sämtliche endlichen Untergruppen der Bewegungsgruppe des Raumes verstehen. Die Bewegungsgruppe eines affinen Raumes über einem euklidischen Vektorraum besteht aus allen affin-linearen eigentlichen Isometrien, es kommen also \zusatzklammer {im Vergleich zur eigentlichen Isometriegruppe} {} {} noch zusätzlich die Verschiebungen dazu. Für endliche Untergruppen ist dieser Unterschied unerheblich, da man mit dem folgenden Lemma die endliche Untergruppen der affinen Bewegungsgruppe als eine Gruppe von linearen Abbildungen realisieren kann.
\inputfaktbeweis
{Endliche Untergruppe/Bewegungsgruppe/Affin/Gemeinsamer Fixpunkt/Fakt}
{Lemma}
{}
{
\faktsituation {Es sei $G$ eine endliche
\definitionsverweis {Untergruppe}{}{}
der
\definitionsverweis {Bewegungsgruppe}{}{}
eines
\definitionsverweis {affinen Raumes}{}{}
$E$ über einem
\definitionsverweis {euklidischen Vektorraum}{}{}
$V$.}
\faktfolgerung {Dann besitzen die Bewegungen der Gruppe einen gemeinsamen
\definitionsverweis {Fixpunkt}{}{.}}
\faktzusatz {Insbesondere kann man eine solche Gruppe als Untergruppe der
\mathl{\operatorname{SO}_{ n }}{} auffassen.}
\faktzusatz {}
}
{
Es sei
\mavergleichskette
{\vergleichskette
{n
}
{ = }{ { \# \left( G \right) }
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
die
\definitionsverweis {Ordnung}{}{}
der Gruppe. Es sei
\mavergleichskette
{\vergleichskette
{ P
}
{ \in }{E
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
ein beliebiger Punkt. Wir betrachten die
\definitionsverweis {baryzentrische Kombination}{}{}
\mavergleichskettedisp
{\vergleichskette
{Q
}
{ \defeq} { \sum_{g \in G} { \frac{ 1 }{ n } } g(P)
}
{ } {
}
{ } {
}
{ } {
}
}
{}{}{.}
Da jedes
\mavergleichskette
{\vergleichskette
{ h
}
{ \in }{G
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
insbesondere eine
\definitionsverweis {affin-lineare Abbildung}{}{}
ist, gilt nach
Lemma 30.9
die Gleichheit
\mavergleichskettedisp
{\vergleichskette
{ h(Q)
}
{ =} { h { \left( \sum_{g \in G} { \frac{ 1 }{ n } } g(P) \right) }
}
{ =} { \sum_{g \in G} { \frac{ 1 }{ n } } h(g(P))
}
{ =} {\sum_{g \in G} { \frac{ 1 }{ n } } ( h \circ g ) (P)
}
{ } {
}
}
{}{}{.}
Da eine Gruppe vorliegt, durchläuft die Menge
\mathbed {h \circ g} {}
{g \in G} {}
{} {} {} {,}
einfach die gesamte Gruppe. Deshalb ist der Ausdruck rechts gleich $Q$ selbst, und somit ist $Q$ ein Fixpunkt für alle
\mavergleichskette
{\vergleichskette
{ h
}
{ \in }{G
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{.}
Wir wählen $Q$ als Ursprung und können dann $E$ mit $V$ identifizieren, wodurch wegen
Lemma 30.11
die affin-linearen Abbildungen zu linearen Abbildungen werden. Dadurch erhalten wir $G$ als Untergruppe der Isometriegruppe von $V$. Da $V$ isometrisch zum $\R^n$ mit dem Standardskalarprodukt ist, ist
\mavergleichskette
{\vergleichskette
{G
}
{ \subseteq }{ \operatorname{SO}_{ n }
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{.}
\zwischenueberschrift{Endliche Bewegungsgruppen in der Ebene}
\inputfaktbeweis
{Euklidische Ebene/Endliche Untergruppe/Eigentlich/Zyklisch/Fakt}
{Satz}
{}
{
\faktsituation {}
\faktvoraussetzung {Es sei
\mavergleichskette
{\vergleichskette
{ G
}
{ \subseteq }{ \operatorname{SO}_{2}
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
eine endliche
\definitionsverweis {Untergruppe}{}{}
der linearen
\definitionsverweis {Bewegungsgruppe}{}{}
der reellen Ebene.}
\faktfolgerung {Dann ist $G$ eine
\definitionsverweis {zyklische Gruppe}{}{.}}
\faktzusatz {}
\faktzusatz {}
}
{
Jedes Element aus $G$ ist nach
Satz 34.4
eine Drehung der Ebene um einen bestimmten Winkel $\theta$. Wir betrachten den surjektiven
\definitionsverweis {Gruppenhomomorphismus}{}{}
\maabbeledisp {} { \R } { \operatorname{SO}_{2}
} { \theta } { D(\theta) = \begin{pmatrix}
\operatorname{cos} \, \theta & - \operatorname{sin} \, \theta \\
\operatorname{sin} \, \theta & \operatorname{cos} \,\theta
\end{pmatrix}
} {,}
der einen Winkel auf die zugehörige Drehung abbildet. Es sei
\mavergleichskette
{\vergleichskette
{H
}
{ \subseteq }{ \R
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
das Urbild von $G$ unter dieser Abbildung, d.h. $H$ besteht aus allen Drehwinkeln zu Drehungen, die zu $G$ gehören. Die Gruppe $H$ wird von einem Repräsentantensystem für die Elemente aus $G$ zusammen mit $2 \pi$ erzeugt. Insbesondere ist also $H$ eine endlich erzeugte Untergruppe von $\R$. Da jedes Gruppenelement aus $G$ eine endliche
\definitionsverweis {Ordnung}{}{}
besitzt, muss jedes
\mavergleichskette
{\vergleichskette
{ \theta
}
{ \in }{ H
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
die Gestalt
\mavergleichskette
{\vergleichskette
{ \theta
}
{ = }{2 \pi q
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
mit einer rationalen Zahl
\mavergleichskette
{\vergleichskette
{ q
}
{ \in }{ \Q
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
haben. Dies bedeutet, dass $H$ eine endlich erzeugte Untergruppe von
\mavergleichskette
{\vergleichskette
{ 2 \pi \Q
}
{ \subseteq }{ \R
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
ist. Damit ist $H$ isomorph zu einer endlich erzeugten Untergruppe der rationalen Zahlen. Nach
Aufgabe 44.4
ist $H$ zyklisch, sagen wir
\mavergleichskette
{\vergleichskette
{H
}
{ = }{ \Z \alpha
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
mit einem eindeutig bestimmten Winkel
\mavergleichskette
{\vergleichskette
{ \alpha
}
{ \in }{ [0,2 \pi)
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{.}
Dann ist die Gruppe $G$ als Bild von $H$ ebenfalls zyklisch.
Der eindeutig bestimmte Winkel ist dabei
\mavergleichskette
{\vergleichskette
{\alpha
}
{ = }{ { \frac{ 2 \pi }{ n } }
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{,}
wobei $n$ die Gruppenordnung ist. Die Gruppe besteht aus den Drehmatrizen
\mathdisp {\begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} , \begin{pmatrix} \cos \left( { \frac{ 2 \pi }{ n } } \right) & - \sin \left( { \frac{ 2 \pi }{ n } } \right) \\ \sin \left( { \frac{ 2 \pi }{ n } } \right) & \cos \left( { \frac{ 2 \pi }{ n } } \right) \end{pmatrix} , \begin{pmatrix} \cos \left( 2{ \frac{ 2 \pi }{ n } } \right) & - \sin \left( 2 { \frac{ 2 \pi }{ n } } \right) \\ \sin \left( 2 { \frac{ 2 \pi }{ n } } \right) & \cos \left( 2 { \frac{ 2 \pi }{ n } } \right) \end{pmatrix} , \ldots , \begin{pmatrix} \cos \left( (n-1) { \frac{ 2 \pi }{ n } } \right) & - \sin \left( (n-1) { \frac{ 2 \pi }{ n } } \right) \\ \sin \left( (n-1) { \frac{ 2 \pi }{ n } } \right) & \cos \left( (n-1) { \frac{ 2 \pi }{ n } } \right) \end{pmatrix}} { . }
Wenn man auch noch uneigentliche Symmetrien zulässt, so gibt es noch eine weitere Familie von endlichen Untergruppen der $\operatorname{O}_{ 2 } \!$, nämlich die Diedergruppen.
\bild{ \begin{center}
\includegraphics[width=5.5cm]{\bildeinlesung {Regular polygons qtl3.svg} }
\end{center}
\bildtext {} }
\bildlizenz { Regular polygons qtl3.svg } {} {Quartl} {Commons} {CC-by-sa 3.0} {}
\inputdefinition
{}
{
Zu einem regelmäßigen $n$-Eck \zusatzklammer {\mathlk{n \geq 2}{}} {} {} heißt die \definitionsverweis {Gruppe}{}{} der \zusatzklammer {eigentlichen oder uneigentlichen} {} {} \definitionsverweis {linearen Symmetrien}{}{} die \definitionswort {Diedergruppe}{} $D_n$.
}
Die Diedergruppe besteht aus den Drehungen des $n$-Ecks und aus den Achsenspiegelungen an den folgenden Achsen durch den Nullpunkt:
\fallunterscheidungzwei {bei $n$ gerade die Achsen durch gegenüberliegende Eckpunkte und gegenüberliegende Kantenmittelpunkte,}
{bei $n$ ungerade die Achsen durch einen Eckpunkt und einen gegenüberliegenden Kantenmittelpunkt.}
In beiden Fällen besteht die Diedergruppe aus $2n$ Elementen.
\bild{ \begin{center}
\includegraphics[width=5.5cm]{\bildeinlesung {Pentagonale bipiramide.png} }
\end{center}
\bildtext {Im Raum lassen sich die Diedergruppen als eigentliche Symmetriegruppen einer Doppelpyramide über einem regelmäßigen $n$-Eck realisieren.} }
\bildlizenz { Pentagonale bipiramide.png } {} {Quatrostein} {Commons} {CC-by-sa 3.0} {}
\zwischenueberschrift{Halbachsensysteme}
Es sei
\mavergleichskette
{\vergleichskette
{G
}
{ \subseteq }{ \operatorname{SO}_{3}
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
eine endliche Untergruppe der Gruppe der eigentlichen, linearen Isometrien. Jedes Element
\mathbed {g \in G} {}
{g \neq \operatorname{id}} {}
{} {} {} {,}
ist nach
Satz 34.7
eine Drehung um eine eindeutig bestimmte Drehachse $A$. Insbesondere sind an einer endlichen Symmetriegruppe nur endlich viele Drehachsen beteiligt. Jedes Gruppenelement bewirkt dann eine Permutation der Drehachsenmenge, und diese Bedingung schränkt die möglichen Gruppen wesentlich ein. Eine Drehachse zerfällt in zwei Halbachsen, und es ist sinnvoll, die Wirkungsweise der Gruppe auf diesen Halbachsen zu untersuchen.
\bild{ \begin{center}
\includegraphics[width=5.5cm]{\bildeinlesung {Duality_Hexa-Okta.png} }
\end{center}
\bildtext {Würfel und Oktaeder besitzen} }
\bildlizenz { Duality Hexa-Okta.png } {} {Peter Steinberg} {Commons} {CC-by-sa 3.0} {}
\bild{ \begin{center}
\includegraphics[width=5.5cm]{\bildeinlesung {Duality_Okto-Hekta.png} }
\end{center}
\bildtext {isomorphe Symmetriegruppen.} }
\bildlizenz { Duality Okto-Hekta.png } {} {Peter Steinberg} {Commons} {CC-by-sa 3.0} {}
Bei einem Würfel gibt es drei verschiedene Arten von Drehachsen: Es gibt drei Drehachsen, die durch die Seitenmittelpunkte gegeben sind, vier Drehachsen, die durch die Eckpunkte gegeben sind und sechs Drehachsen, die durch die Kantenmittelpunkte gegeben sind. Betrachtet man alle \stichwort {Durchstoßungspunkte} {} dieser Achsen mit der Sphäre vom Radius $1$, so ergeben sich
\mavergleichskette
{\vergleichskette
{ 6+8+12
}
{ = }{ 26
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
Punkte. Diese Punkte entsprechen den \stichwort {Halbachsen} {.} Dabei gibt es zu je zwei Eckpunkten
\zusatzklammer {bzw. den zugehörigen Durchstoßungspunkten} {} {}
\zusatzklammer {mindestens} {} {}
eine Würfelbewegung, die sie ineinander überführt, ebenso zu je zwei Kantenmittelpunkten und zu je zwei Seitenmittelpunkten. Jede Bewegung permutiert diese charakteristischen Punkte. Wenn man eine Achse
\zusatzklammer {oder einen Durchstoßungspunkt} {} {}
fixiert, so kann man die Menge der Bewegungen betrachten, die diese Achse als Drehachse haben. Es kann natürlich auch die Achse zwar auf sich selbst abgebildet werden, aber nicht fix sein. Dann werden die gegenüberliegenden Durchstoßungspunkte ineinander überführt.
\inputdefinition
{}
{
Es sei
\mavergleichskette
{\vergleichskette
{G
}
{ \subseteq }{ \operatorname{SO}_{3}\,(\R)
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
eine
\definitionsverweis {endliche Untergruppe}{}{}
der Gruppe der eigentlichen, linearen Isometrien im $\R^3$. Dann nennt man jede Gerade durch den Nullpunkt, die als Drehachse eines Elementes
\mavergleichskette
{\vergleichskette
{g
}
{ \neq }{
\operatorname{Id}
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
auftritt, eine \definitionswort {Achse}{} von $G$. Die Halbgeraden dieser Drehachsen nennt man die \definitionswort {Halbachsen}{} der Gruppe und die Gesamtmenge dieser Halbachsen nennen wir das zu $G$ gehörige \definitionswort {Halbachsensystem}{.} Es wird mit
\mathl{{\mathfrak H}( G )}{} bezeichnet. Zwei Halbachsen
\mavergleichskette
{\vergleichskette
{ H_1,H_2
}
{ \in }{ {\mathfrak H}( G )
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
heißen \definitionswort {äquivalent}{,} wenn es ein
\mavergleichskette
{\vergleichskette
{ g
}
{ \in }{ G
}
{ }{}
{ }{}
{ }{}
}
{}{}{}
mit
\mavergleichskette
{\vergleichskette
{ g(H_1)
}
{ = }{ H_2
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
gibt. Die Äquivalenzklassen zu dieser Äquivalenzrelation nennt man \definitionswort {Halbachsenklassen}{.}
}
Da jede von $\operatorname{Id}$ verschiedene Drehung genau eine Drehachse hat, ist das Halbachsensystem zu einer endlichen Symmetriegruppe endlich
\zusatzklammer {und zwar ist die Anzahl maximal gleich \mathlk{2( \operatorname{ord} \, (G)-1)}{}} {} {.}
Wenn $H$ eine Halbachse ist und
\mavergleichskette
{\vergleichskette
{ g
}
{ \in }{ G
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{,}
so ist auch
\mathl{g(H)}{} eine Halbachse: wenn nämlich
\mavergleichskette
{\vergleichskette
{ h
}
{ \in }{ G
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
die durch $H$ definierte Achse als Drehachse besitzt, so ist
\mavergleichskettedisp
{\vergleichskette
{ { \left( g h g^{-1} \right) } (g(H))
}
{ =} { (g h) { \left( g^{-1} ( g (H)) \right) }
}
{ =} { (g h) (H))
}
{ =} { g( h (H))
}
{ =} { g(H)
}
}
{}{}{.}
Mit \anfuehrung{äquivalenten Halbachsen}{} ist also wirklich eine Äquivalenzrelation definiert.
\inputbeispiel
{}
{
Beim Würfel werden die Halbachsen durch die Eckpunkte, die Seitenmittelpunkte und die Kantenmittelpunkte repräsentiert. Diese drei Arten bilden dann auch die Äquivalenzklassen, also die Halbachsenklassen. Der Vergleich mit dem Oktaeder zeigt, dass die Sprechweise mit den Halbachsen für die Bewegungsgruppe als solche angemessener ist als die Sprechweise mit Ecken, Kanten, Mittelpunkten.
}
\inputbeispiel
{}
{
Bei einem Tetraeder gibt es vier Eck-Seitenmittelpunkt-Achsen und vier Kantenmittelpunkt\-achsen. Die Kantenmittelpunkthalbachsen sind dabei alle untereinander äquivalent, während die zuerst genannten Achsen in zwei Halbachsenklassen zerfallen, nämlich die Eckhalbachsen und die Seitenhalbachsen.
}
An diesem Beispiel sieht man auch, dass die beiden durch eine Drehachse gegebenen Halbachsen nicht zueinander äquivalent sein müssen.
\zwischenueberschrift{Die Isotropiegruppe}
\inputfaktbeweis
{Eigentliche Bewegungsgruppe/Fix/Endliche Untergruppe/Äquivalente Halbachsen/Isomorphe Isotropiegruppen/Fakt}
{Lemma}
{}
{
\faktsituation {Es sei
\mavergleichskette
{\vergleichskette
{ G
}
{ \subseteq }{ \operatorname{SO}_{3}\,(\R)
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
eine endliche
\definitionsverweis {Untergruppe}{}{}
der
\definitionsverweis {Gruppe}{}{}
der
\definitionsverweis {eigentlichen, linearen Isometrien}{}{}
des $\R^3$.}
\faktvoraussetzung {Zu einer
\definitionsverweis {Halbachse}{}{}
$H$ von $G$ sei
\mavergleichskettedisp
{\vergleichskette
{ G_H
}
{ =} { { \left\{ g \in G \mid g(H)=H \right\} }
}
{ } {
}
{ } {
}
{ } {
}
}
{}{}{.}}
\faktfolgerung {Dann sind für zwei
\definitionsverweis {äquivalente Halbachsen}{}{}
\mathkor {} {H_1} {und} {H_2} {} die Gruppen
\mathkor {} {G_{H_1}} {und} {G_{H_2}} {}
isomorph.}
\faktzusatz {Insbesondere besitzen sie die gleiche Ordnung.}
\faktzusatz {}
}
{
Es sei
\mavergleichskette
{\vergleichskette
{g(H_1)
}
{ = }{H_2
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{,}
was es gibt, da die beiden
\definitionsverweis {Halbachsen}{}{}
nach Voraussetzung äquivalent sind. Dann hat man aber sofort den
\definitionsverweis {Gruppenisomorphismus}{}{}
\maabbeledisp {} {G_{H_1}} {G_{H_2}
} {f} { g \circ f \circ g^{-1}
} {.}
Wegen
\mavergleichskettedisp
{\vergleichskette
{ { \left( gfg^{-1} \right) } (H_2)
}
{ =} {gf { \left( g^{-1}(H_2) \right) }
}
{ =} {gf(H_1)
}
{ =} {g(H_1)
}
{ =} {H_2
}
}
{}{}{}
führt dieser
\definitionsverweis {innere Automorphismus}{}{}
von $G$ in der Tat die beiden Gruppen ineinander über.
Bei $G_H$ handelt es sich trivialerweise um eine Untergruppe von $G$. Man nennt sie die \stichwort {Isotropiegruppe} {} zur Halbachse $H$. Das Lemma besagt also, dass äquivalente Halbachsen isomorphe Isotropiegruppen besitzen. Wenn
\mavergleichskette
{\vergleichskette
{n
}
{ = }{ { \# \left( G \right) }
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
ist und $H$ eine Halbachse in der
\definitionsverweis {Halbachsenklasse}{}{}
$K$, und die Untergruppe $G_H$ $k$ Elemente besitzt, so gibt es in $K$ genau $n/k$ verschiedene Halbachsen. Die fixierte Halbachse $H$ definiert nämlich eine surjektive Abbildung
\maabbeledisp {} {G} {K
} {f} {f(H)
} {.}
Dabei geht
\mavergleichskette
{\vergleichskette
{ f
}
{ \in }{ G_H
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
auf $H$, und ebenso gibt es für jede Halbachse
\mavergleichskette
{\vergleichskette
{ H'
}
{ \in }{ K
}
{ }{
}
{ }{
}
{ }{
}
}
{}{}{}
genau $k$ Urbilder.